

{kind=link}
Esta idea me surgió hace unas semanas , es peliagudo lo que voy a describir pero la lucidez aparece en momentos concretos de nuestra vida.
Ya en el hospital ingresado tras haber sufrido un infarto de miocardio agudo en una de las tres arterias , en concreto la descendente anterior , una de las dos palometas de 3 vías colocadas en las muñecas de las manos para extracción o introducción de líquidos (suero) , me aparece la idea de utilizarlo como válvula de tres vías junto con un servo para el control del submarino de entrada y salida del lastre.
Me compré un medidor de presión arterial de muñeca para poder controlarme mi presión arterial de vez en cuando , la curiosidad me llevó a desmontar el dispositivo para ver su funcionamiento.
Cual fue mi sorpresa que me encontré una bomba de vacío miniatura instalada , que me serviría perfectamente para realizar el llenado y vaciado del lastre de mi submarino.
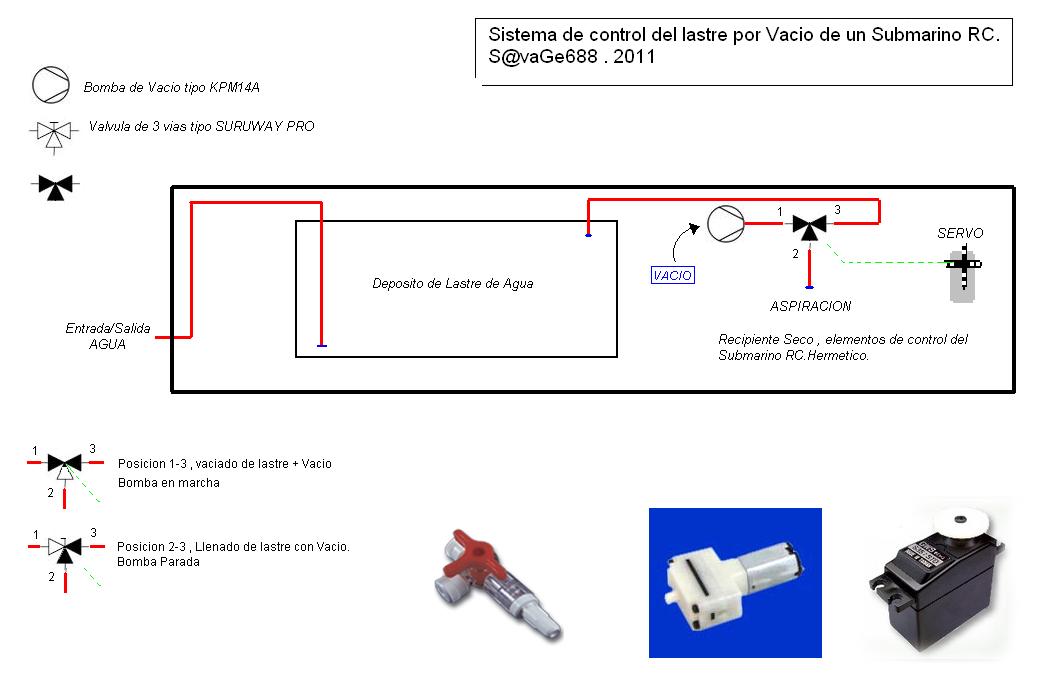
Bomba de Vacío -KPM14A
Voltaje – DC3.0V
Consumo - <380mA
Tiempo de expulsión - <7.5 S (From 0 to 300 mmHg in a 100CC tank.)

Valvula de 3 vias
Existen muchos tipos de marcas y modelos , las que tenía instalada fueron unas SURUWAY.
360° Rotación
Para la presión de (85 psi)
Uno de los puntos mas importantes a la hora de construir un modelo de estas características es el control del lastre de un submarino de Radiocontrol.
Existen varios tipos de métodos para manipular el lastre un submarino RC , cada uno tiene sus diferencias y dificultades , esta funciona simplemente con una bomba de vacío de 3 Voltios , de las utilizadas en los medidores de presión arterial como he comentado y una llave de palometa de 3 vías utilizadas para el suero.
Las figura que expongo muestra perfectamente su funcionamiento y con un buen control de radio y sistema de seguridad podemos tener perfectamente controlado el llenado y el vaciado del lastre de nuestro modelo.
Funcionamiento :
El funcionamiento es muy simple y lógico ,partiendo de un recipiente estanco, en este caso de un tubo de PVC transparente para poder ver mejor el funcionamiento interno, más un depósito interno para el lastre.
Pasos previos antes de introducir el submarino en el Agua.
Como es una acción de vacío, tenemos que preparar el interior con de presión para después succionar el agua
Dejando nuestro modelo en flotabilidad positiva a nivel de flotación correcto y dejando la válvula de tres vías en posición 1-3, accionamos la bomba de vacío 10 segundos para extraer el aire contenido en el depósito de lastre y provocando un vacío en el tubo estanco que mas adelante veremos.
.
Una vez colocado el submarino en el agua, para el llenado del lastre giramos la válvula de tres vías en posición 2-3.( Bomba parada).
Ahora tenemos un vacío dentro del casco seco que utilizaremos para succionar el agua cuando nos interese para llenar el lastre de agua.
Milagrosamente veremos como el agua se introduce en el depósito de lastre por acción de vacío consiguiendo sumergir nuestro modelo por peso y volumen.
Hay que tener en cuenta que si sobrepasamos los límites de la altura del depósito de lastre, nuestra bomba no le pasará nada, pero inundaremos el casco seco.
Para lograr una detención de agua en la zona de vacío montaremos un detector de agua, donde pondrá en marcha la bomba para poder extraer el agua del lastre, por seguridad.
Esta claro que para sacar el agua del lastre simplemente pasaremos a posición inicial 1-3 , desalojando el agua del lastre y a la vez creando el vacío del principio dejando el submarino preparado para la siguiente inmersión.
Este dispositivo es efectivo ya que este tipo de válvulas al poder trabajar con posiciones intermedias tienes una regulación muy variable y ajustada ya que el control lo realizará un servo acoplado a la palometa de su eje de rotación
SERVO + VALVULA

DETALLE DE ACOPLAMIENTO

VIDEO - ACOPLE SERVO-VALVULA
VIDEO - FUNCIONAMIENTO LASTRE POR VACIO
1 comentario:
hola jose maria...
felicitaciones por tu proyecto!!
Yo me encuentro haciendo un sistema de lastre para un sub, y queria preguntarte si este sistema puede ser controlado, solo permitiendo el ingreso de un nivel aproximado de agua, esto quiere decir que al succionar el agua, el tanque no se llene por completo, sino que se llene por ejemplo la mitad del tanque o un cuarto del tanque... es posible?? muchas gracias por tu ayuda, y de verdad felicitaciones nuevamente por tu sistema.
Publicar un comentario